Glass Bottom Float, 2008-2013
a robot that knows if it is a good day for a swim
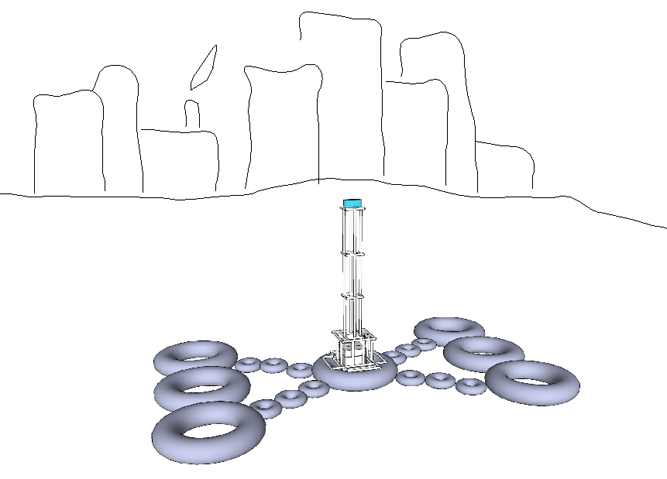
The Glass Bottom Float (GBF) is a floating public robot with the mission of making the critical assessment of recreational water quality a transparent and participatory experience W.G Sebald might have appreciated.
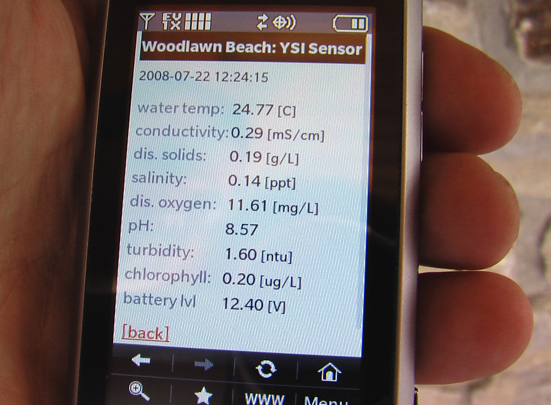
GBF cruises along a beach shore, and offers itself as a resting spot in places it deems clean enough for swimming. Over time it maps paths of least contamination and highest relative pleasure for fish and people. GBF assesses the current state of the waters with a three-tiered sensing system informed by best practices of recreational water quality assessment science: Established metrics (algae, chlorophyll, dissolved oxygen and others), experimental metrics (near real-time in-situ e-coli, wave motion) and untested metrics (the presence and sounds of fish and crustaceans) are combined and compared with post swimming experience surveys to create a qualitative measure of water quality; the swimming pleasure measure (SPM). All results are public domain. Data is available for mobile phones, allowing for on-demand inquiry of swimming pleasures, discourse on water quality and our limits of understanding it.








Acknowledgements
Thanks to Joe Attkinson, Brian Clark and Mark Shepard.